

检测标准
锥筒型复合材料探伤设备按GJB1038.1A-2004标准验收,具体要求如下:
1.区域距离小端0-300mm验收要求为:
(1)穿透波≥10%;
(2)偏差≤14dB;
(3)穿透波偏差15dB-18dB之间时,面积不超过可探测面积的5%,单个面积≤900mm
2. 区域距离小端300mm大端验收要求为:
(1)穿透波≥10%
(2)偏差≤18dB
设计依据
本设备设计依据使用产品形状尺寸,检测内部缺陷的要求设计。
内部缺陷主要有:分层、裂纹、气孔、疏松、积胶其它外来杂质等缺陷。
超声波主机
概述:根据锥筒的形状尺寸设计成十三轴对穿喷水检测装置,整个系统由下列六个部分组成:
(1) 超声波主机
(2) 超声波探头
(3) C扫描软件
(4) 机械装置(包括模组和水槽)
(5) 运动控制软件
(6) 水循环系统
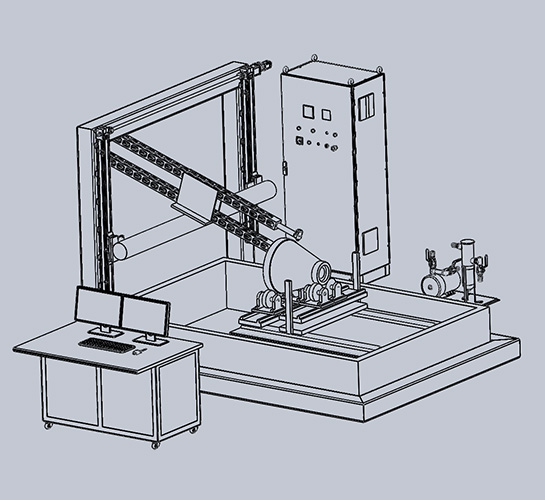
设备完整的3D图如下图所示,下面对各部分进行说明。
PRF | 25~10KHz |
电压 | -25~800V |
水平线性 | ≤0.4% |
垂直线性 | ≤3% |
灵敏度余量 | 配用 2.5P20 探头发现距探测面 200mm 的 Φ2mm 平底孔的探伤灵敏度余量不小于 56dB |
阻尼 | 40Ω、80Ω |
采样率 | 100M |
带宽 | 0.5~10MHz |
增益 | 0.0~110.0dB |
滤波器 | 窄带、宽带 |
检波 | 正向、负向、全波、射频、频谱 |
信号处理 | |
测量闸门 | A、B |
闸门起点 | 全范围 |
闸门宽度 | 闸门起点到全范围 |
闸门高度 | 5~95% |
显示读数 | 闸门内幅度及声程读数 |
测量分辨率 | 0.1mm |
系统/其他 | |
功耗 | 15W,依配置不同而异 |
数据传输 | 1000M 以太网 |
网络接口 | 100M/1000M 以太网接口 |
超声波探头
使用两个探头,一发一收 探头型号:1MHZΦ20
|
图 2 |
C扫描软件
软件全中文界面,通过系统软件可对机械运动系统、超声检测系统等集成控制,软件功能特点如下:
(1)数据显示和存储
具备实时A、C扫描等扫查和图像显示、存储;
图像处理:包括图像缩放、平移、测量、调色板可换等功能;
(2)缺陷测量与统计分析
可对C扫描图像的缺陷进行分类标注,标注出各个缺陷的几何轮廓、位置坐标、缺陷面积大小及面积百分比并生成列表;
(3)缺陷自动跟踪定位功能(或称缺陷回位):
在检测结果的C扫描图上,需要探头定位到任意缺陷位置,用鼠标将光标移至所要缺陷位置,探头便可自动移动到工件相应位置。
(4)缺陷打标
在相应位置涂与超声信号幅度对应的色彩,生成C扫描检测结果。
(5)生成报告
经过人工对超声波实时A扫波形进行判读,并结合C扫描检测图像对产品质量进行判定,并可一键生成相关检测产品的超声波检测报告。
机械装置
1.十三轴机械自动化模块
(1) 上下Z轴 (2) 斜向Z轴 (3) 斜向Z轴间距调节 (4) 斜向Z轴旋转 (5) X轴:沿着锥筒轴线方向运动 (6) Y轴:沿着X轴垂直方向运动 (7) 内A轴 | (8) 外A轴 (9) 大头间距调节轴 (10) 小头间距调节轴 (11) 小头上下调节轴 (12) 大小头间距调节轴 (13) 旋转轴 |
直线轴精度:
定位精度:≤1mm;
重复定位精度:≤±0.1mm;
2.框架和水箱
l 框架是水箱的承载体,全部为钢制结构,具有很强的刚性。
l 框架的支撑脚带有高度调整螺栓,可调整水箱支撑面的水平度。
l 水箱采用304不锈钢材料焊接制成,具有足够刚性。
l 水箱留有手动阀门控制的进水口、溢流口以及排水口。
运动控制系统
根据13轴机械,运动控制需要配置相应的13轴运动控制卡
1.电控柜
![]()
图 6:电控柜
2.手操遥控板
系统可通过 C 扫描遥控器(也称手控器)进行手动运动控制,该手操遥控板通过线缆连接 到主控柜中,因此可以让操作人员自由手动操作,甚至带到检测区域。所有的运动控制功能均 可通过该手操器来实现,可在低速与高速模式下快速调整各轴到所需要的位置。它将使得手动 运动控制非常便捷,尤其是在制定扫描路径和进行系统维护时。
![]()
图 7:C扫描遥控器
3.急停开关
本系统安装急停开关,可在紧急情况下使系统切断运动控制电机的电源。故障排除后,释 放按钮方可恢复给运动系统供电。此外,设备上的所有安全警示将以中文标识。
水循环过滤系统
过滤水中杂质
公用介质条件
供电:电源接至操作间受电开关,照明用电:AC220V,50Hz±1Hz,5kW。
供水:工业水,最大消耗量为 5m3/h。
地线:对地电阻<2.5欧姆。
注:以上介质条件以使用方提供的基础条件图为准。